

日産ノートe-POWERが煩く感じる理由
現在所有しているノートe-POWERですが、バッテリーが十分にあるにも関わらず、低速時の何でも無いときにエンジンが稼働するときがあります。
これが最も効率の良い回転数である2,400回転毎分で唸るため、こちらの記事でも書いている通り、静かな場所や地下駐車場ではとても煩く感じます。

ノートe-POWERのグレードにはXとMEDALISTがあります。
MEDALISTは遮音材などが追加されて静音対策がされているようですが、試乗した時は私が乗っているXグレードとそこまで大差は無いかなという感想です。
シングルボードコンピュータのRaspberry Piで車両データを取ってみる
シングルボードコンピュータとは、一つの基盤上にコンピュータを動作させるための部品が全て納められている小型コンピュータのことです。
その中でもRaspberry Pi(以下、ラズパイと言います。)は、様々な大学や企業、個人で利用されている代表的なシングルボードコンピュータと言えるでしょう。
私が持っているラズパイは、記事作成時点で最新型から一世代前のRaspberry Pi 3B+です。
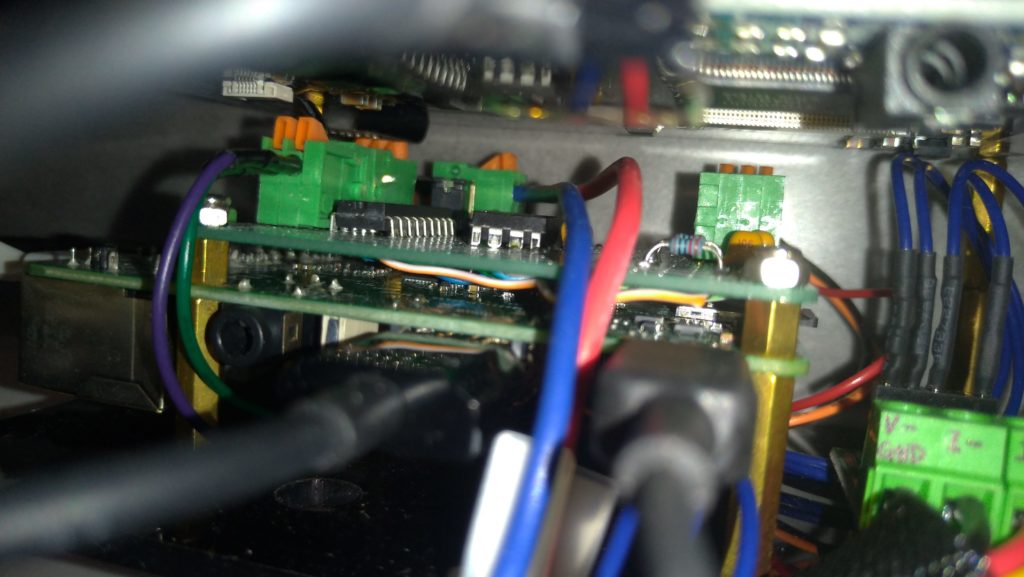
CAN通信ディスプレイを自作してみた
元々はラズパイをVPNサーバとして、自宅で利用していました。
ちょうど、キックスを購入したので自動車に搭載できるデバイスで何かできないかなと考えたときに、レーダー探知機として市販品にも売られていますが、車両のリアルタイムデータを見てみるというのが面白そうと思ったのがキッカケです。
インターネットで調べてみると、OBD2コネクタからCANレシーバーを繋げれば、普通にラズパイからSocket通信できるので何とかなりそう。
更に調べてみると詳しく解説しているサイトもありました。
そして、自作したCAN通信ディスプレイがこちらです。
※すみません。動画のエンジン回転数の表示は計算式の誤りで正しくありません。後日、修正しています。
ネットワークの事はある程度分かっていますが、プログラミングは初心者です。
試行錯誤しながら、プログラム言語のPythonを覚えて、一応動作するものを作ることができました。
このCAN通信ディスプレイについては、後日の記事でもう少し詳しく書いてみるつもりです。
ノートe-POWERのエンジンが掛かるタイミング
CAN通信ディスプレイを使って、エンジン回転数、エンジン冷却水温度、車両速度をリアルタイムに取得して、グラフ化したものです。その時の走行条件は次の通りです。
・前半は交通量が多く渋滞しているほか、信号による停止を繰り返している
・当日の外気温は25度でエアコンは停止している
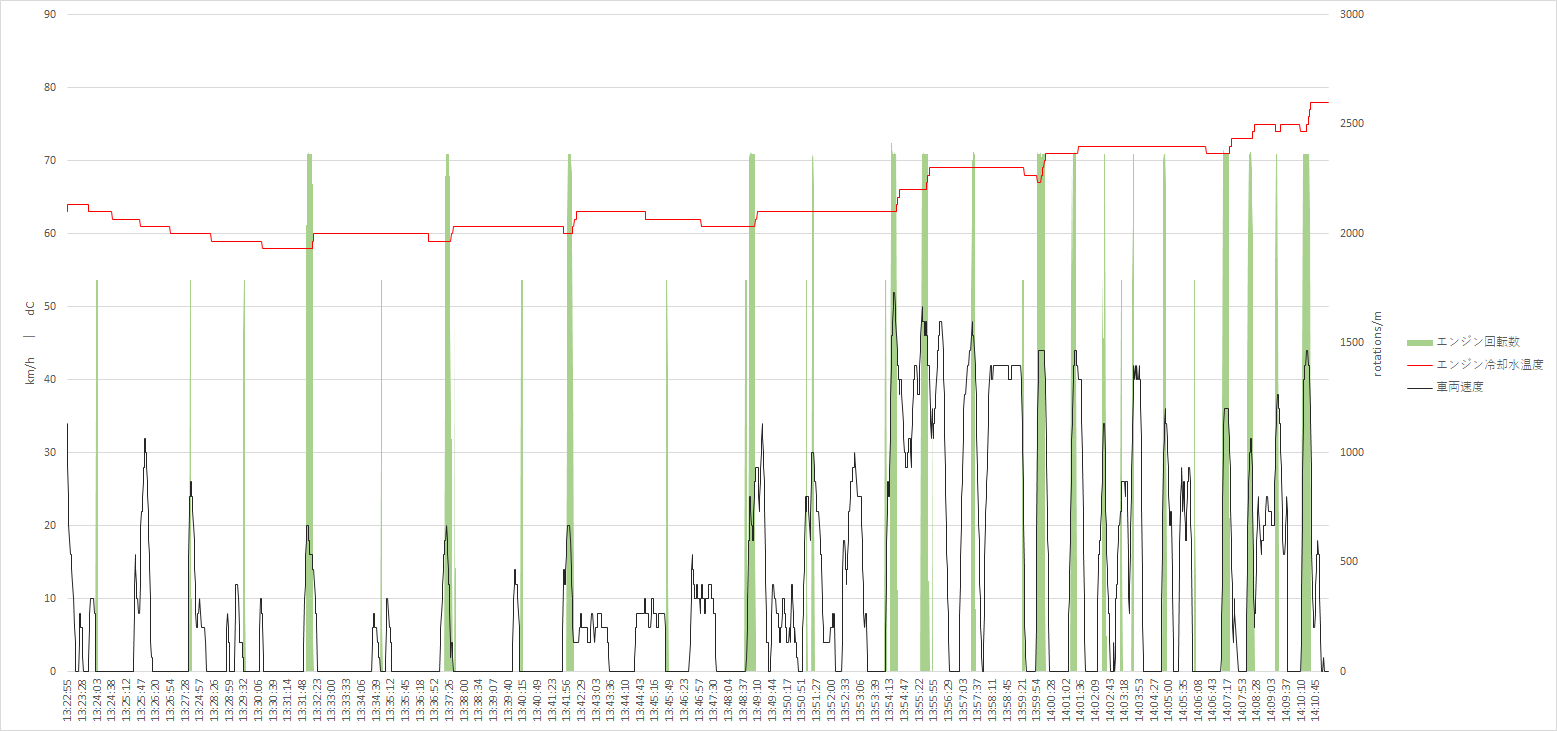
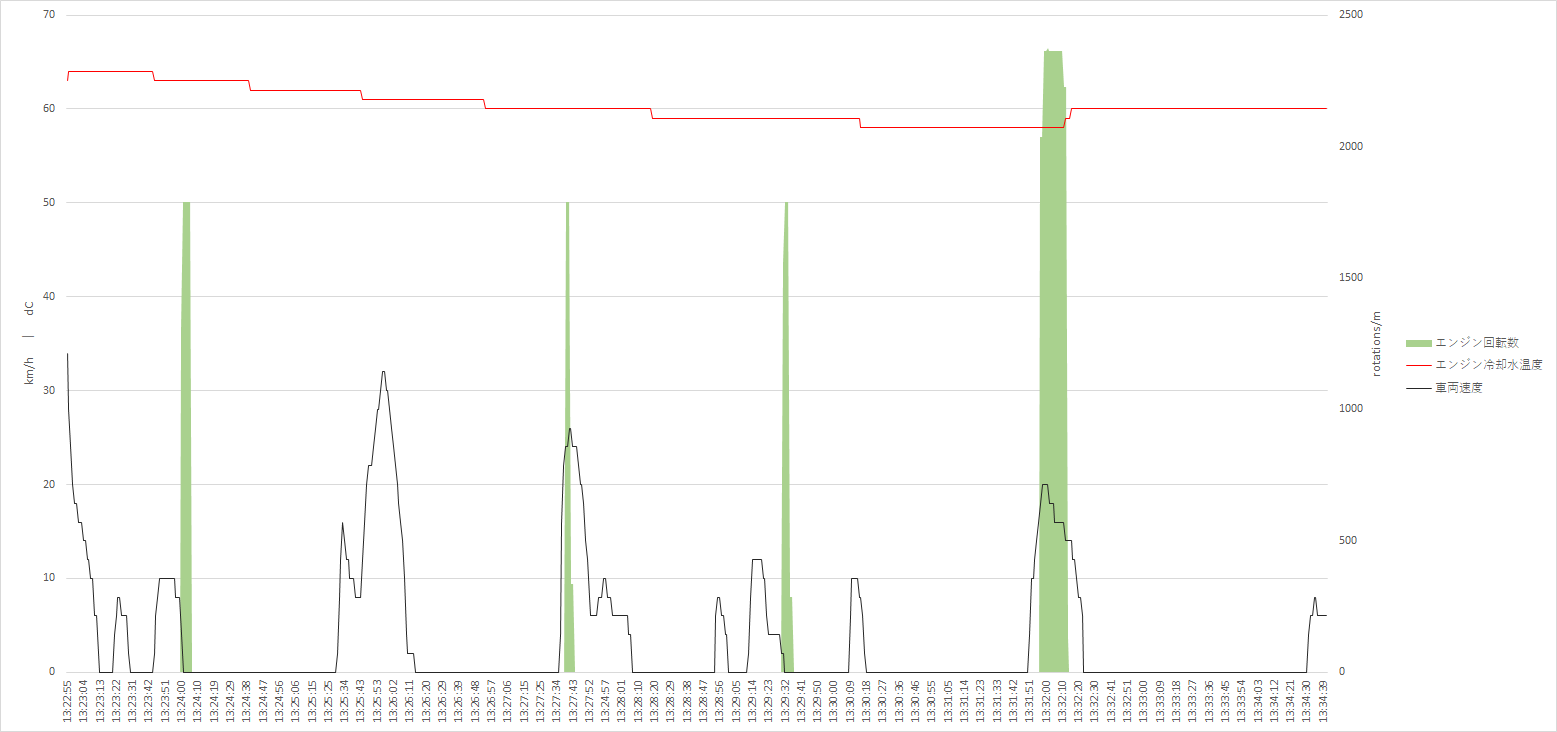
このグラフから読み取れたのは、以下の通りです。
・低速走行時でも頻繁にエンジンが稼働している
・一方、車両速度が高くて(30km/h程度)もエンジンが稼働していない場面もある
・数秒程度の短時間に稼働と停止を繰り返している
・低速回転(約1,800回転毎分)と高速回転(約2,400回転毎分)の違いがある
この時の燃費は確か燃費計で26km/Lくらいでした。渋滞や低速走行時の燃費はe-POWERだけあって、良く伸びます。
しかし、エンジンの掛かるタイミングは良く分かりません。
駆動用バッテリーのゲージは残っているのにエンジンが高速回転します。気になり始めると仕方がありません。
低速回転でエンジンが稼働しているときは、ガソリンエンジン車のアイドリングに近い音質であまり気にならないんですけどね。
次はキックスが納車したら、近い条件でデータを取得してみます。エンジンの稼働タイミングがどのように変わるのか気になるところです!

